Инженеры показали мощный портативный двигатель для искусственных мышц
Так называемые «мягкие роботы» (soft robots) представляют собой гидравлические или пневматические устройства, имитирующие поведения мышц. Их используют в основном для реабилитации людей после травм рук или ног.
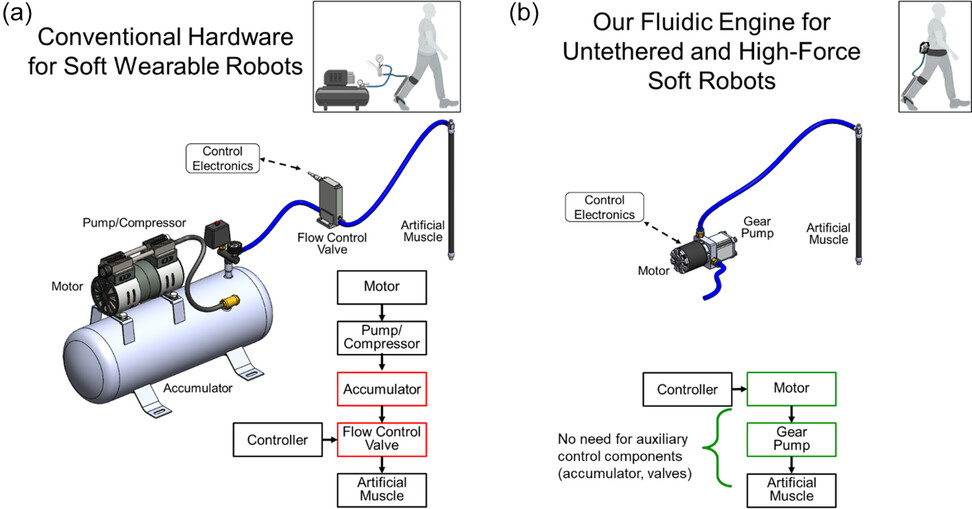
Перед исследователями стояла задача решить две ключевые проблемы подобных устройств разом. Большинство жидкостных двигателей для «мягких роботов» физически подключены к внешнему источнику питания (например, к воздушному компрессору), что существенно ограничивает их применимость.